






W ramach ImPACT Tough Robotics Challenge, dzięki kooperacji naukowców z Tokyo Institute of Technology i Bridgestone Corporation opracowano sztuczny mięsień z napędem hydraulicznym, stanowiący kolejny krok w stronę budowy wytrzymałego robota, zdolnego operować w trudnych warunkach, np. w obszarach klęsk żywiołowych.
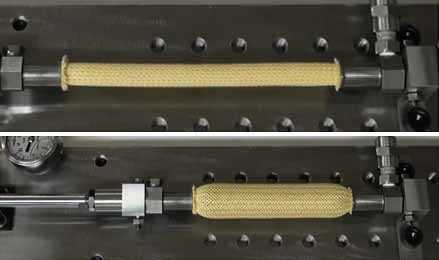
Nowy sztuczny mięsień o dużej mocy, z napędem hydraulicznym (zewnętrzna średnica mięśnia: 15 mm, maksymalna siła skurczu 7 kN)
Wytworzony na bazie gumowych przewodów mięsień jest mocny, a jednocześnie lekki i wytrzymały na uderzenia, wibracje i wstrząsy.
Celem, przyświecającym organizatorom i uczestnikom ImPACT (Impulsing PAradigm Change through disruptive Technologies program) Tough Robotics Challenge jest rozwój wytrzymałych robotów do zadań specjalnych (misje ratownicze i zapewnianie bezpieczeństwa w warunkach np. trzęsienia ziemi). Eksploatacja konwencjonalnych robotów w takich okolicznościach napotyka na poważne problemy. Po pierwsze wynika to z faktu, że tradycyjne napędy i siłowniki są słabe i ciężkie. Po drugie nie są odporne na wibracje i uderzenia. Trudność sprawia także konieczność wykonywania precyzyjnych ruchów z wykorzystaniem dużej mocy. Takie możliwości mają ludzkie mięśnie i to one posłużyły za inspirację japońskim naukowcom. Opracowany według tej koncepcji sztuczny mięsień, zbudowany z gumowych przewodów i rozciągliwych włókien, jest wprawiany w ruch za pomocą ciśnienia hydraulicznego. Gumowe przewody o wzmocnionych końcówkach są zdolne wytrzymać ciśnienie 5 MPa, a wytrzymałość na czynniki zewnętrzne zapewnia powłoka z rozciągliwych włókien, splecionych na kształt tkaniny. Stosunek mocy do wagi, dzięki wykorzystaniu gumy, jest od pięciu do dziesięciu razy lepszy niż w przypadku konwencjonalnych napędów elektrycznych i siłowników hydraulicznych.
Japońscy naukowcy są przekonani, że robot, zbudowany przy wykorzystaniu takich mięśni, będzie mógł wykonywać prace związane z narażeniem na duże wibracje i wstrząsy, np. wiercenie udarowe, wyburzanie. Rozwój koncepcji ma umożliwić zastosowanie robotów w ratownictwie.



