






Jeszcze do niedawna robotyzacja wymagała mechanicznego pozycjonowania elementów przenoszonych/obrabianych tak, aby pozycje dla robota były jednoznacznie określone i powtarzalne. Realizowały to mechaniczne układy oparte o siłowniki, bandy i prowadnice. Od roku 2011 polski przemysł zaczął znacząco opierać swoją produkcję na systemach wizyjnych. Pośród wielu ich zastosowań niezwykle ciekawe jest zastosowanie związane ze współpracą z robotami przemysłowymi.
Paweł Handzlik
Systemy wizyjne mogą swobodnie zastąpić mechaniczne systemy pozycjonujące. Dzięki wizji maszynowej robot wie dokładnie, gdzie znajduje się dany element i może dynamicznie modyfikować pozycje w programie ruchy. Oznacza to, że zamiast doprowadzać do sytuacji, w której każdy produkt jest ustawiony idealnie w tym samym miejscu co poprzedni, wyposażamy robota w zmysł widzenia oraz pozwalamy mu decydować, jak ma się poruszać, na bazie tego co zobaczy, żeby precyzyjnie pobrać każdy kolejny produkt, niezależnie od tego, jak jest on spozycjonowany. Istotne jest tylko to, aby produkt został doprowadzony w obszar pracy robota (oraz pole widzenia kamery). System wizyjny określi pozycję produktu i zweryfikuje również czy możliwe jest jego pobranie. Informację o tym prześle do robota.
W niniejszym artykule przedstawiam sześć aplikacji, w których roboty współpracują z systemami wizyjnymi realizując zadania w przemyśle. W tych aplikacjach zastosowanie systemów wizyjnych pozwoliło wyeliminować lub ograniczyć systemy mechaniczne do pozycjonowania produktów.
Bezobsługowe stanowisko do podawania detali do obróbki
Stanowisko zrobotyzowane zostało oparte na robocie przemysłowym Kawasaki FS006N oraz na systemie wizyjnym Vision POWERBOX. System posiada znacznie ograniczoną liczbę mechanizmów. Pozycjonowanie zostało zastąpione systemem wizyjnym. Mechaniczne rozwiązania ograniczają się jedynie do podawania detali w obszar pracy robota. Dzięki temu stanowisko działa prawie bezobsługowo.
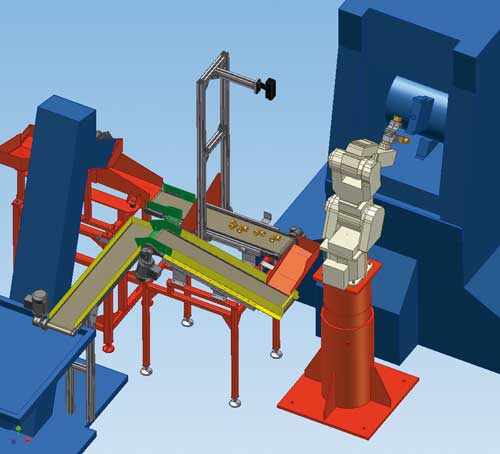
Model stanowiska
Praca aplikacji polega na automatycznym podaniu detalu przez transporter z zasobnika pod system wizyjny. Po wykonaniu zdjęcia obraz jest obrabiany w celu uzyskania współrzędnych orientacji chwytaka robota względem detalu i orientacji jego położenia. Następnie dane są przesyłane do robota w przestrzeni jego układu, po sieci Ethernet. Po spełnieniu warunków (możliwe pobranie detalu ze względu na miejsce i ewentualną kolizję z innymi elementami) robot wykonuje pobranie i umiejscowienie detalu w gnieździe obróbczym.
cały artykuł dostępny jest w wydaniu 10 (85) październik 2014



