






(artykuł reklamowy)
Prawidłowe przygotowanie oferty na stanowisko zrobotyzowane, szybkie zaprogramowanie celi zrobotyzowanej, w której pracuje kilka robotów, sprawdzenie czasu cyklu, zasięgów i prawidłowy dobór robota dla aplikacji – to wszystko nie może odbyć się bez właściwego oprogramowania symulacyjnego 3D.
Takie oprogramowanie to także konieczne narzędzie w firmach integratorskich, które w odpowiedzi na rosnące wymagania klientów muszą zaprezentować ofertę nie tylko technicznie odpowiednią i z korzystną ceną, ale także z odpowiednią wizualizacją procesu.
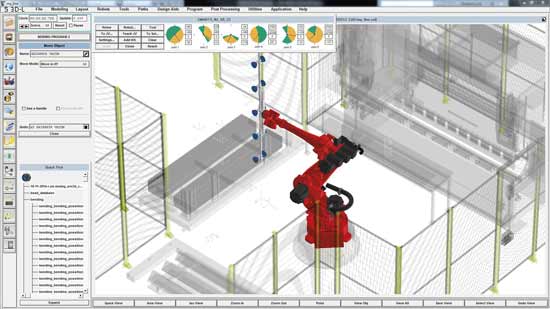
Dla tych celów COMAU ROBOTICS oferuje specjalistyczne oprogramowanie wysokiej jakości: ROBOSIM PRO. Oprogramowanie składa się z dwóch współpracujących ze sobą modułów – środowiska 3D do symulacji robotów COMAU – SIM 3D oraz wirtualnego kontrolera C5G. Dzięki ścisłej współpracy obu modułów oprogramowanie umożliwia:
analizę zasięgu robotów COMAU wszystkich typów,
analizy czasu cyklu oparte o planer trajektorii (RRS), uwzględniający realne osiągi danego robota, i o wirtualny kontroler robota C5G
wykonanie symulacji ruchów robota oraz dodatkowych obiektów, takich jak przenośniki, zachowanie detalu, chwytaki i wiele innych
programowanie robota w trybie offline, przygotowanie trajektorii ruchu opartej o język programowania robotów COMAU – PDL2, wszystko z wykorzystaniem wirtualnego panelu programowania TeachPendant.
Praca z oprogramowaniem SIM 3D jest prosta i intuicyjna, a wykonanie symulacji lub programowania robota w trybie offline przebiega w kilku prostych krokach.
Zazwyczaj praca inżynierów z oprogramowaniem zaczyna się od importu modelu robota COMAU. Wszystkie potrzebne biblioteki robotów są wbudowane w oprogramowanie, dzięki czemu szybko można zaimportować dowolnego robota. Następnie oprogramowanie automatycznie instaluje planer trajektorii RRS, który zapewnia modelowi pracę z parametrami właściwymi dla prawdziwego robota danego typu. Od tego momentu robotem można sterować z poziomu symulatora SIM 3D lub przy użyciu wirtualnego panelu programowania.
Aby sprawdzić zasięgi (zasymulować ruchy robota) najczęściej potrzebny jest wirtualny model środowiska pracy – a więc model ogrodzeń, maszyny, z którą ma współpracować robot itp. W ROBOSIM PRO można dokonać importu dowolnej geometrii 3D (np. pliku stp) stworzonej w programach CAD (np. SolidWorks, Inventor, Catia). Jeśli nie mamy takiego programu ROBOSIM PRO umożliwia także rysowanie w 3D, zarówno prostych figur geometrycznych, jak i bardziej skomplikowanych kształtów krzywoliniowych.
cały artykuł dostępny jest w wydaniu 6 (117) czerwiec 2017



