






Rozwiązując zadanie odwrotne kinematyki, dla znanych xA, yA oraz kąta ϕ, poszukujemy kątów: θ1, θ2 oraz θ3. Dla kończyny 1 i z równania (3.6) obliczono kąt θ1:![]()
(3.9)
gdzie:
Z zależności trygonometrycznych wynikają zależności:
i
gdzie:
podstawiając do wzoru (3.9) otrzymano:![]()
(3.10)
rozwiązując równanie (3.10) dla t1 otrzymujemy:
(3.11)
Model bryłowy przedstawiony na rysunkach 3.3 i 3.4 to szczególny przypadek rozpatrywanego manipulatora 3RRR. Słowo „szczególny” oznacza, iż w rozpatrywanych równaniach wymiar h jest równy zeru. W manipulatorze zaproponowano napęd z użyciem par pneumatycznych aktuatorów mięśniowych o długości 300 mm i średnicy 10 mm firmy Festo. 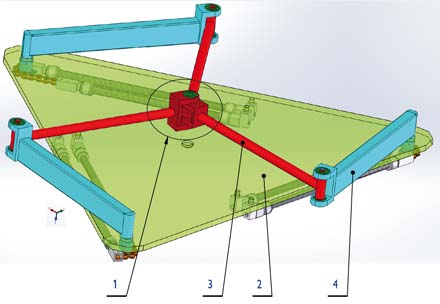
Rys. 3.3 Model bryłowy pneumatycznego manipulatora równoległego typu 3RRR, widok z platformą roboczą: 1 – platforma robocza, 2 – podstawa, 3 – ramię, 4 - przedramię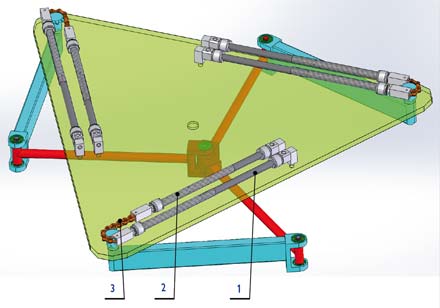
Rys. 3.4 Model bryłowy pneumatycznego manipulatora równoległego typu 3RRR, widok z członami napędowymi: 1, 2 – aktuator pneumatyczny (mięsień), 3 – łańcuch
Na rysunku 3.5 przedstawiono model bryłowy przegubów platformy roboczej wraz z widocznymi częściami ramion manipulatora. 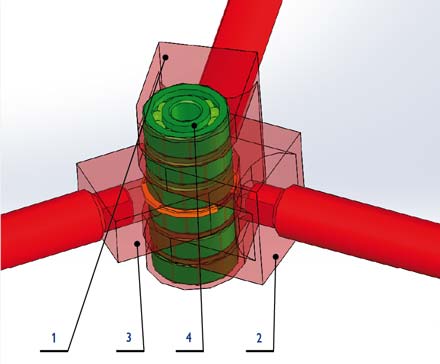
Rys. 3.5 Widok modelu bryłowego węzłów platformy roboczej: 1 - korpus zewnętrzny przegubu potrójnego, 2 – korpus środkowy przegubu potrójnego, 3 - korpus zewnętrzny przegubu potrójnego, 4 - łożyska
Wnioski
W artykule przedstawiono prototyp pneumatycznego manipulatora typu „trąba słonia” oraz wirtualny projekt manipulatora o zamkniętym łańcuchu kinematycznym z aktuatorami mięśniowymi, zaprojektowany w oprogramowywaniu SolidWorks. Przedstawiono konstrukcję manipulatora typu płaszczyznowego 3RRR wraz z opisem zależności geometrycznych. Manipulator tego typu powinien cechować się dużą dynamiką, łagodnym startem i zatrzymaniem, O cechach manipulatora można wnioskować na podstawie własności zaproponowanych napędów. Tego typu manipulatory mogą znaleźć zastosowanie w pakowaniu, paletowaniu, montażu oraz jako manipulatory rehabilitacyjne.
Sławomir Błasiak, Marta Grzyb, Paweł Łaski, Jakub Takosoglu
Politechnika Świętokrzyska,
Wydział Mechatroniki i Budowy Maszyn
Literatura:
Grzyb M.: Projekt sterowania płaszczyznowym robotem równoległym z pneumatycznym napędem mięśniowym, Praca dyplomowa inżynierska, Kielce 2008.
Kuhlbusch W., Neumann R.: Virtual Prototyping of a Parallel Robot actuated by Servo-Pneumatic Drives using ADAMS/Controls, MSC.ADAMS European User Conference 2002.
Łaski P., Dindorf R.: Badanie modelowe manipulatora elektropneumatycznego typu tripod. KKA’2005 – XV Krajowa Konferencja Automatyki, Warszawa 27-30 czerwca 2005.
Merlet J.,P.: Parallel robot. Springer Verlag, New York, London 2000.
Tsai L-W.: Robot Analysis: The Mechanics of Serial and Parallel Manipulators, John Wiley & Sons, New York 1999.
www.brl.ac.uk/projects/EyeRobot
Łaski P., Błasiak S., Dindorf R., Takosoglu J.: Manipulator typu DELTA o zamkniętym łańcuchu kinematycznym z napędem mięśniowym, Projektowanie i Konstrukcje Inżynierskie nr 6 (45) 2011, s. 20-25.
Takosoglu J., Błasiak S., Dindorf R., Łaski P., Woś P.: Mięśniowy układ napędowy manipulatora równoległego typu DELTA, Streszczenia referatów. XVII Krajowa Konferencja Automatyki – KKA 2011. Wydawnictwa Politechniki Świętokrzyskiej, Kielce 2011, s. 221-222.
Takosoglu J., Błasiak S., Dindorf R., Łaski P.: Mięśniowy układ napędowy, Projektowanie i Konstrukcje Inżynierskie, nr 6 (45) 2011, s. 58-63.
artykuł pochodzi z wydania Styczeń/luty 1/2 (52/53) 2012
Czytaj także:




- start
- Poprzedni artykuł
- 1
- 2
- 3
- Następny artykuł
- koniec