






Dr Ralph Hollis skonstruował w 2005 roku robota zwanego Ballbot, który może poruszać się po bardzo ciasnych korytarzach i przejściach, przy pomocy kulistej podstawy poruszanej silnikami indukcyjnymi.
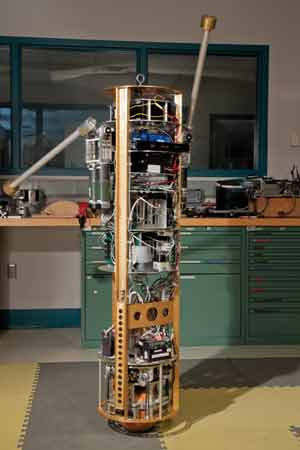
Obecnie, naukowiec Carnegie Melon University uprościł konstrukcję, stosując tylko jeden kulisty silnik indukcyjny, którego wykonanie wymagało dużej precyzji. Wirnik nowego sinika stanowi wydrążona żelazna kula pokryta warstewką miedzi. Wokół niej znajduje się sześć stojanów. Dzięki zastosowaniu takiego rozwiązania niemal całkowicie wyeliminowano tarcie, znacznie zwiększając sprawność i trwałość robota. Urządzenie może poruszać się w bardzo ciasnych miejscach, np. pomiędzy regałami magazynu, z prędkością 1,9 m/sek., która odpowiada prędkości szybkiego spaceru.
