






Zespół naukowców z wydziału inżynierii Uniwersytetu w Bristolu, pod kierownictwem prof. Jonathana Rossitera, w swojej pracy z dziedziny robotyki inspiruje się przyrodą, a konkretnie organizmami żywymi, które wykorzystują skórę, jako element motoryczny – takimi jak węże i ślimaki. Badacze zaprezentowali opracowaną przez siebie miękką i elastyczną strukturę o właściwościach motorycznych, przypominającą skórę, a także opartego na niej mikrorobota.
Miękkie roboty są rozciągliwe i giętkie
Podczas gdy konwencjonalne roboty są sztywne i mało podatne na manipulację, miękkie roboty są rozciągliwe i giętkie, dzięki czemu łatwo dostosowują się do warunków otoczenia. Jednak jak dotąd możliwości tego typu robotów w zakresie przylegania do powierzchni podłoża były zupełnie oddzielone od ich motoryki, co stanowiło przeszkodę w budowie robotów, poruszających się na podobnej zasadzie co węże czy ślimaki.

Schemat sztucznej skóry
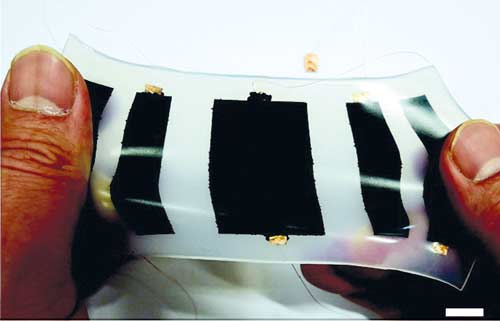
Zaproponowana przez badaczy z Bristolu sztuczna skóra zawiera kombinację mikroelementów elektrycznych, z których jedne działają jako sztuczne mięśnie, kurczące się i rozprężające na przemian, a drugie zapewniają przyczepność do podłoża, dzięki oddziaływaniu elektrostatycznemu. Odpowiednia konfiguracja naprzemiennych faz przyczepiania i kurczenia się skóry zapewnia ruch posuwisty robota. Jest on przy tym zupełnie miękki i elastyczny, i daje się łatwo zwinąć lub złożyć.
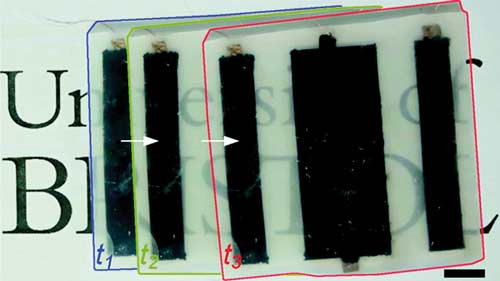
Mikrorobot przemieszcza się po powierzchni; pasek skali oznacza 1 cm
W przyszłości tego typu sztuczna skóra może posłużyć do budowy wysokomobilnych mikrorobotów inspekcyjnych, poruszających się po pionowych ścianach czy po suficie, a także urządzeń ubieralnych.
University of Bristol
