






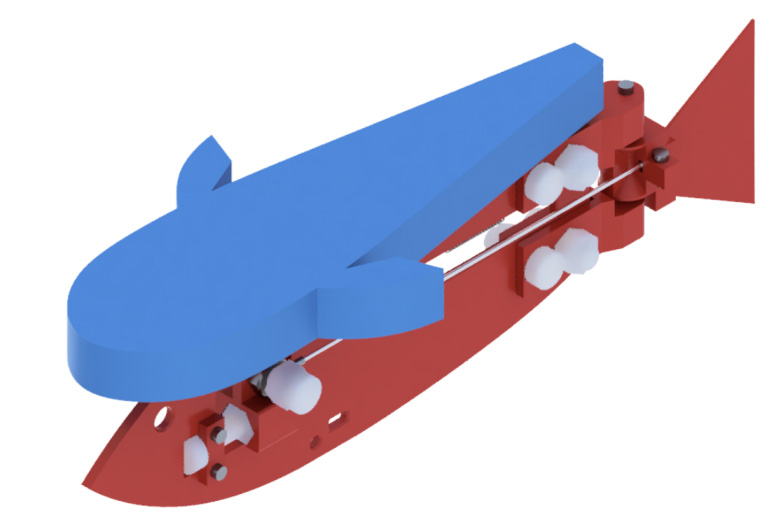
Naukowcy z Uniwersytetu Bristolskiego zbudowali pływającego robota, który kształtem i sposobem poruszania się przypomina ryby. Urządzenie o nieskomplikowanej konstrukcji składa się z rozmieszczonego horyzontalnie pływaka, zapewniającego wyporność oraz z pionowej powierzchni, do której przymocowany jest układ napędzający płetwę ogonową.
Konstrukcja napędu płetwy składa się z naciągów umieszczonych przeciwlegle po obu stronach kadłuba, z których jeden stanowi sprężyna, a drugi to termomechaniczny mięsień TCP (twisted and coiled polymer), który kurczy się pod wpływem ciepła. Dzięki temu, zgodnie z prawem Joule’a, przepuszczenie prądu przez przewodnik wpleciony w TCP powoduje jego skurczenie. W odróżnieniu od dotychczasowych konfiguracji, wymagających pełnego wystudzenia TCP by powrócić do położenia pierwotnego, zastosowanie sprężyny znacznie optymalizuje wydajność układu. Modulacja impulsowa zsynchronizowana z cyklem pracy sprężyny i TCP pozwala uzyskać regularne ruchy płetwy ogonowej o częstotliwości do 2 Hz.

Jak wyjaśnia Tsam Lung You z Uniwersytetu Bristolskiego, TCP to nowy, obiecujący siłownik, charakteryzujący się atrakcyjnymi cechami, takimi jak niska masa, niskie koszty, wysoka gęstość energii i łatwość wykonania. Układ napędowy zastosowany w konstrukcji robota-ryby wyróżnia się najwyższą częstotliwością działania TCP, jak i najwyższą prędkością osiągniętą przy użyciu napędu TCP. Otwiera to drogę do popularyzacji TCP w nowych zastosowaniach.
Obecnie trwają pracę nad nową generacją robota-ryby, tym razem inspirowanego budową ryb z rzędu Gymnotiformes (eng. knifefish). W zamyśle twórców ma to być już w pełni funkcjonalny robot pływający.
bristol.ac.uk



