






Miękki pełzający robot z rozproszoną, programowalną aktywacją termiczną, poruszający się jak gąsienica, to proste urządzenie, które może mieć wiele różnych zastosowań, dzięki zdolności do poruszania się w bardzo ograniczonej przestrzeni.

Wraz z silną presją na elektryfikację pojazdów i statków powietrznych obserwujemy rosnące zapotrzebowanie na innowacje w dziedzinie budowy kondensatorów, wykorzystywanych do krótkotrwałego dostarczania mocy szczytowej w elektrycznych układach napędowych. Naukowcy z Lawrence Berkeley National Laboratory opracowali nowej generacji kondensator, zdolny obsługiwać rekordowe ilości energii elektrycznej i wytrzymywać wysoką temperaturę.
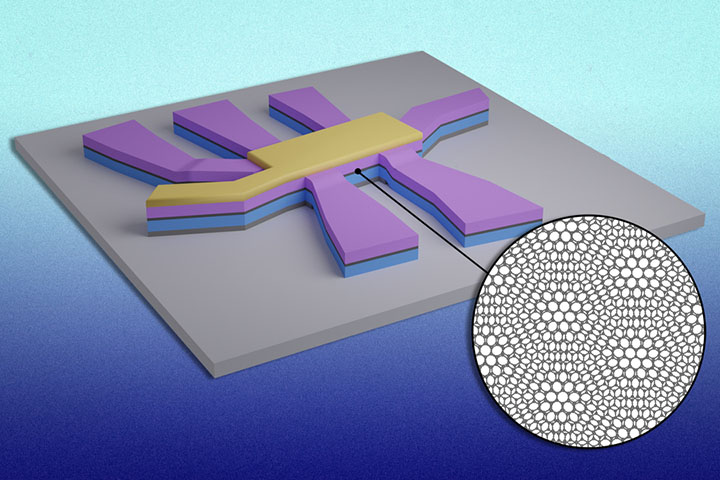
Grafen ciągle demonstruje coraz to nowe właściwości. Naukowcy z Massachusetts Institute of Technology znaleźli jego nową, bardzo egzotyczną właściwość. Stosując płytki o grubości jednego atomu, ułożone pod objętym tajemnicą kątem, zbudowali strukturę, która błyskawicznie potrafi zmienić się z izolatora w nadprzewodnik i odwrotnie.
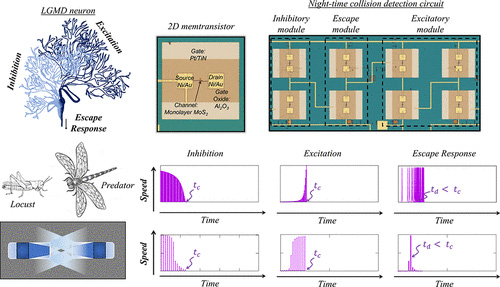
Systemy CASE związane z bezpieczeństwem jazdy autonomicznej, wykrywające inne pojazdy i przeszkody, a przede wszystkim ostrzegające przed kolizją, są bardzo skomplikowane. Wykorzystują rozbudowane układy elektroniczne, radarowe, lidar itd. Tymczasem statystycznie połowa wypadków śmiertelnych na drodze zdarza się o zmroku i w nocy, mimo że wtedy ruch zmniejsza się aż o 3/4.
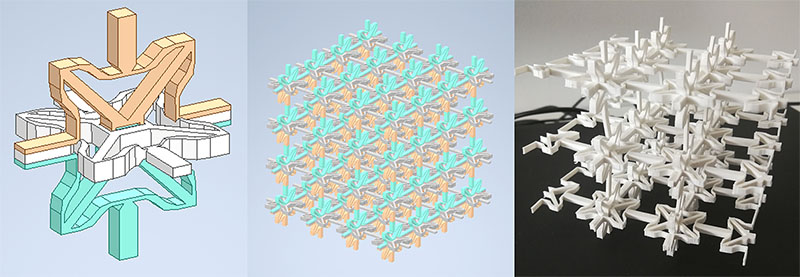
Materiał, który po naciśnięciu przycisku zmienia kształt, byłby pożądany zarówno wśród producentów mebli, sprzętu medycznego i sportowego, jak i w miękkiej robotyce i przemyśle kosmicznym. Naukowcy Instytutu Fraunhofera opracowują właśnie takie materiały, analizując polimery termoplasyczne i stopy metali, w tym stopy z pamięcią kształtu.
Specjalistyczny portal inżynierski dla osób zaangażowanych w tworzenie produktów – maszyn, urządzeń, mechanizmów, podzespołów, części, elementów itd. – od koncepcji do ostatecznego wykonania.