







Naukowcy z uniwersytetów Maryland i Houston opracowali nowy, w pełni biodegradowalny, akumulator, nie zawierający drogich metali ziem rzadkich.
Mimo zabezpieczających powłok i stosowania specjalnych płynów, oblodzenie stanowi nadal poważny problem w transporcie lotniczym. Podczas dekady 1990-2000 odpowiadało ona za aż 12% katastrof. Oblodzenie potrafi poważnie uszkadzać linie energetycznei ograniczać aż o 80% wydajność turbin wiatrowych.
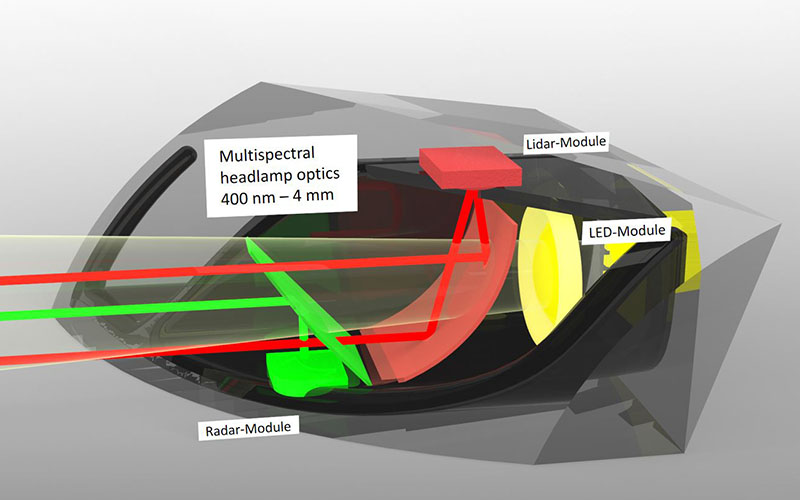
Większość współczesnych samochodów ma układy wspomagające kierowcę co najmniej na pierwszym lub drugim poziomie autonomii. Asystenci pasa ruchu, pomiary odległości z niezależnym od kierowcy awaryjnym hamowaniem stają się codziennością. Uruchamiane są przez czujniki wykorzystujące laserowe LiDARy i klasyczne układy radarowe. Analizując budowę wielu pojazdów naukowcy z Instytutu Fraunhofera stwierdzili, że rozmieszczenie czujników w samochodach ma wiele wad i powoduje, że układy nie działają prawidłowo.
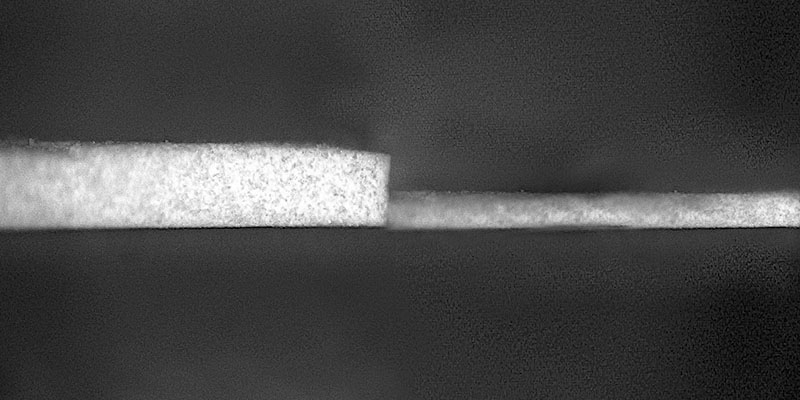
Porównanie grubości farb wynalezionych na Uniwersytecie Purdue: po lewej warstwa 400-mikronowa, po prawej najnowsza, 150-mikronowa
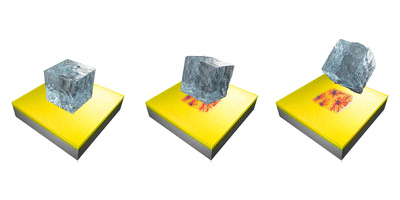
Profesor inżynierii Xiulin Ruan z uniwersytetu Purdue był zaskoczony tym, że wynaleziona przez jego zespół biała farba znalazła się w najnowszym wydaniu Księgi Rekordów Guinnessa, jako uznana przez autorów za najbielszą.

Zespół inżynierów z Imperial College London i EMPA (Eidgenössische Materialprüfungs- und Forschungsanstalt) pod kierownictwem prof. Mirko Kovaca prowadzi badania nad zastosowaniem roju dronów do budowy konstrukcji budowlanych. Opracowane rozwiązania wykorzystują technologię druku 3D z betonu i inspirowane są pracą pszczół.
Specjalistyczny portal inżynierski dla osób zaangażowanych w tworzenie produktów – maszyn, urządzeń, mechanizmów, podzespołów, części, elementów itd. – od koncepcji do ostatecznego wykonania.