






Spośród wielu problemów, z którymi boryka się górnictwo morskie, na wyróżnienie zasługuje problem transportu ludzi pomiędzy obiektami oceanotechnicznymi a statkami. Transport ten wiąże się z wysokim ryzykiem zajścia różnego rodzaju wypadków. Aktualnie pracowników górnictwa morskiego transportuje się pomiędzy dwoma obiektami oceanotechnicznymi i statkami za pomocą koszy zawieszonych na wysięgniku lub dźwigu, lin podwieszonych do konstrukcji platformy, lub za pomocą helikoptera. Powyższe sposoby transportu nie należą do bezpiecznych, są niepraktyczne i nieefektywne. Zaistniała więc potrzeba opracowania nowego systemu transportującego ludzi w środowisku morskim w sposób szybki, bardziej wydajny, a przede wszystkim bezpieczny.
Henryk Olszewski, Marek Biernat, Przemysław Dominiczak
Konstrukcje trapów wykorzystywanych na morzu i w portach można podzielić na trapy klasyczne, pozbawione napędu, oraz trapy wyposażone we własne układy napędowe. Nową tendencją w budowie trapów są konstrukcje z układami kompensacji ruchu. Urządzenia te wyposażone są zwykle w systemy hydrauliczne umożliwiające połączenie statku z innym obiektem oceanotechnicznym oraz zapewniające kompensację przemieszczeń trapu wywołanych ruchami statku na fali (Rys. 1).
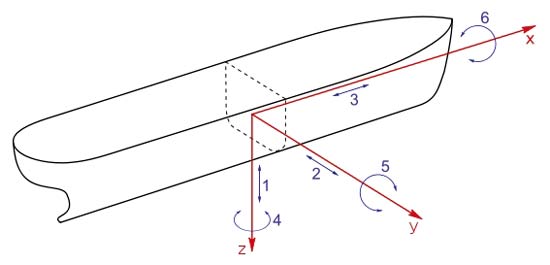
Rys. 1 Ruchy statku na fali:
1 – nurzanie, 2 – dryfowanie, 3 – płynięcie, 4 – myszkowanie, 5 – kiwanie, 6 – kołysanie
Konstrukcja zrobotyzowanego trapu
Opracowany zrobotyzowany trap wyposażony jest w układ kompensacji jego położenia oraz orientacji. Podobne rozwiązanie zostało zaproponowane przez firmę Ampelmann (Rys. 2). Jest ono oparte na platformie Stewarta wyposażonej w siłowniki hydrauliczne umożliwiające kompensację ruchów trapu w sześciu stopniach swobody.
Głównymi elementami opracowanego manipulatora trapu są (Rys. 3, 4): wysięgnik, platforma, układ kompensacji ruchu i podstawa.
cały artykuł dostępny jest w wydaniu 6 (81) czerwiec 2014



