






Podczas procesu projektowania często dąży się do jak największego wykorzystywania elementów gotowych, w celu redukcji czasu, jak i kosztów. W przypadku projektowania zautomatyzowanych i zrobotyzowanych linii produkcyjnych czy gniazd obróbczych, wykorzystuje się modele robotów przemysłowych. Można je pobrać z bibliotek producenta. Zazwyczaj występują one tylko w formatach uniwersalnych.
Bernard Pacula
Pierwszym krokiem do wykonania modelu i sprawdzenia np. ruchliwości robota, czy możliwych kolizji, jest znalezienie odpowiedniego modelu geometrycznego. Można, jak sugerowałem, pobrać model ze strony producenta, ale można również to zrobić korzystając z różnych bibliotek z modelami CAD.
Mając model, zazwyczaj w formacie uniwersalnym, należy go wczytać do programu (tu: Solid Edge), w celu utworzenia złożenia. Jeśli podczas wczytywania nie zostanie wybrany odpowiedni szablon, czyli np. środowiska części zamiast złożenia, wczytany zostanie jako pojedyncza bryła. W takiej sytuacji przeprowadzenie symulacji będzie niemożliwe, gdyż tylko w środowisku części definiowane są odpowiednie relacje geometryczne – a co za tym idzie – można zdefiniować, gdzie występuje możliwość ruchu. Po poprawnym wczytaniu geometrii robota jako złożenia, nie ma jeszcze możliwości utworzenia symulacji ruchu, gdyż nie ma zdefiniowanych relacji geometrycznych, łączących poszczególne komponenty. Dodatkowo, każdy utworzony podczas translacji komponent, domyślnie ma przypisaną relację utwierdzenia, przez co nie ma możliwości przemieszczania się (Rys. 1).
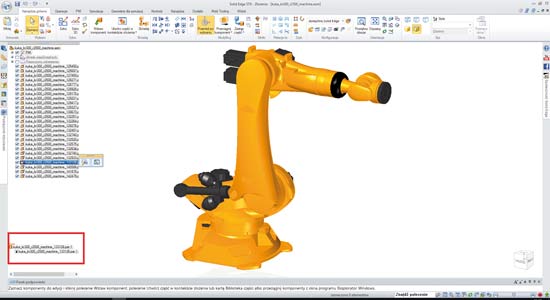
Rys. 1
Wybierając w tym momencie polecenie Narzędzia główne -> Modyfikuj -> Przeciągnij komponent nie ma możliwości wskazania jakiegokolwiek elementu do wykonania ruchu, gdyż przypisane utwierdzenie blokuje taką możliwość. Aby umożliwić sprawdzenie ruchliwości ramienia, zarówno ręcznego, jak i wymuszonego przez zadanie napędu, konieczna będzie zamiana relacji na takie, które umożliwią utworzenie poszczególnych par kinematycznych.
cały artykuł dostępny jest w wydaniu 1/2 (100/101) styczeń-luty 2016



