






Na tym etapie definicji mechanizmu nie jest możliwa symulacja jego ruchu (Rys. 6) – system podpowiada, że konieczne jest zdefiniowanie przynajmniej jednego polecenia (lub poleceń) napędzającego ten mechanizm.
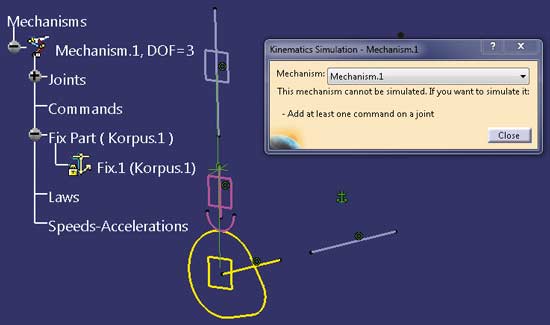
Rys. 6
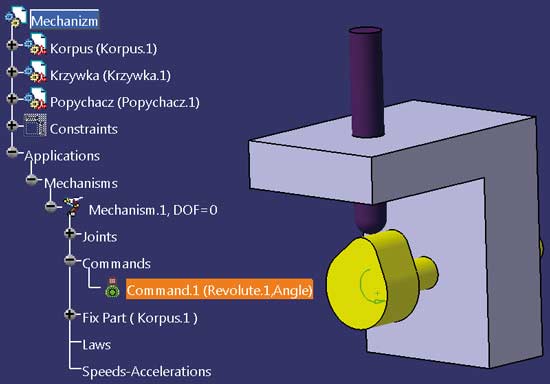
Po wykonaniu analizy mechanizmu (Rys. 7) widać wyraźnie, że zdefiniowane są tylko dwie (Number of joints: 2) pary kinematyczne (Revolute.1 (Krzywka.1, Korpus.1) i Cylindrical.2 (Popychacz.1, Korpus.1)), rozpoznane na podstawie wcześniej zdefiniowanych relacji typu Assembly Constraints (Number of joints: 2) – brakuje pary kinematycznej Krzywka-Popychacz, czyli powiązania ruchu krzywki z ruchem popychacza.
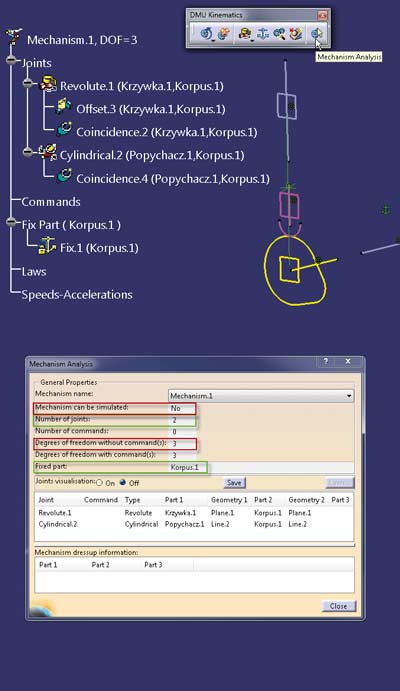
Rys. 7
Jak napędzać taki mechanizm? Odpowiedź jest prosta: trzeba zapewnić obrót Krzywki względem Korpusu. Która para kinematyczna łączy Krzywkę z Korpusem? Oczywiście: Revolute.1 (Krzywka.1, Korpus.1). Definicja pary Revolute.1 musi być zmodyfikowana w taki sposób, aby system „wiedział”, że obrót wałka krzywki (aktywna opcja Angle driven dla Revolute.1 – Rys.8) jest funkcją napędową tego mechanizmu. Po zdefiniowaniu polecenia napędowego stopień swobody mechanizmu został zredukowany z DOF=3 do DOF=2.

Rys. 8
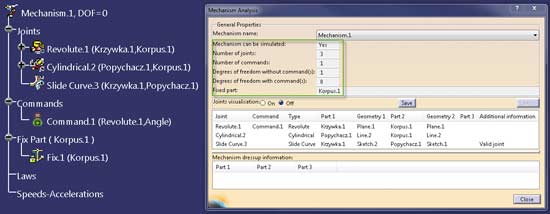
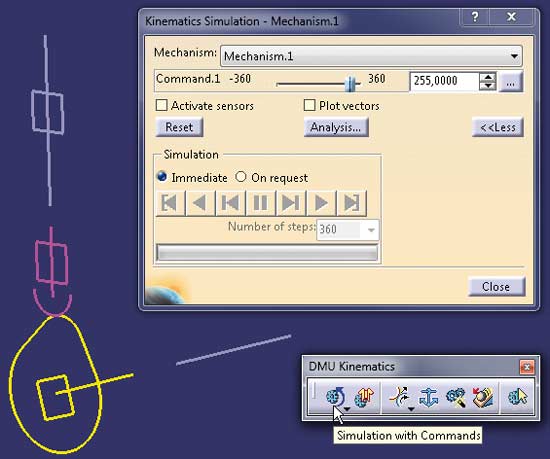
Trzeba jeszcze zdefiniować parę kinematyczną typu Slide Curve (Rys. 9), aby powiązać obrót krzywki z ruchem popychacza. Po zaakceptowaniu tej definicji mechanizm ma 0 stopni swobody (DOF=0) i można wykonać symulację jego ruchu (Rys. 10).
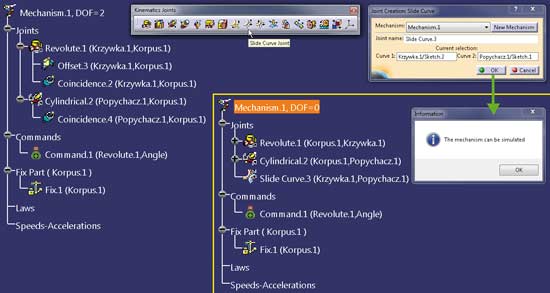
Rys. 9
Rys. 10
Możliwość obrotu popychacza została odebrana po zdefiniowaniu pary Slide Curve.3, bo krzywe tworzące tę parę kinematyczną (fioletowy łuk popychacza i żółty kontur krzywki) leżą na jednej płaszczyźnie i są do siebie styczne. Gdyby ten warunek geometryczny nie był spełniony to definicja pary kinematycznej typu Slide Curve nie byłaby możliwa (Rys. 11).
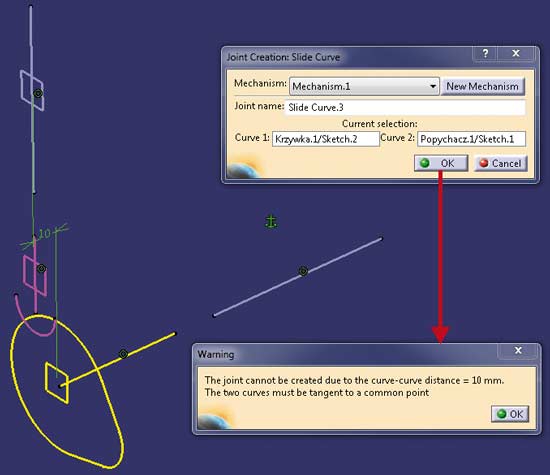
Rys. 11
Mechanizm został zdefiniowany i za pomocą polecenia Simulation with Commands można sprawdzić czy działa poprawnie (Rys. 12). Definicja mechanizmu to jednak nie tylko możliwość symulacji jego ruchu, bo w środowisku DMU Kinematics można przeanalizować poprawność przemieszczania poszczególnych komponentów, śledzić zmiany wartości wybranych parametrów, wygenerować trajektorię ruchu wybranych punktów, itd. To jednak za dużo na artykuł o ograniczonej objętości. Zainteresowanych odsyłam do dokumentacji systemu CATIA V5 lub literatury książkowej – jest nawet książka na ten temat napisana po polsku!
Rys. 12
Model wyrobu, w którym zdefiniowano mechanizm można oczywiście wzbogacić o elementy bryłowe (Rys. 13) i/lub powierzchniowe, oraz wykonać kolejne analizy poprawności projektowania, na przykład analizę kolizji podczas ruchu.
Rys. 13
Andrzej Wełyczko
ps.
W systemie CATIA V6 zagadnienie definiowania mechanizmów jest znacznie prostsze, bo omówione powyżej relacje typu Assembly Constraints i Kinematics Joints są jednocześnie tworzone podczas definicji relacji Engineering Connection.
artykuł pochodzi z wydania 7/8 (82/83) lipiec/sierpień 2014
Czytaj także:




- start
- Poprzedni artykuł
- 1
- 2
- Następny artykuł
- koniec