






 Ekran modułu Motion został podzielony na kilka obszarów spełniających specjalizowane zadanie. Funkcje konieczne do przeprowadzenia symulacji zostały zgrupowane w formie pasków narzędzi:
Ekran modułu Motion został podzielony na kilka obszarów spełniających specjalizowane zadanie. Funkcje konieczne do przeprowadzenia symulacji zostały zgrupowane w formie pasków narzędzi:
Narzędzia paska Motion – budowania animacji (rys. 2)
Narzędzia paska XY Graph – edycji wykresów, dodawania etykiet na wykresie, powiększania wybranego fragmentu wykresu czy ustawiania osi wykresu
Narzędzia paska Animation Control – sterowanie obliczonej wcześniej animacji
Pasek Motion Navigator – zbiór składników animacji
Kolejne kroki postępowania podczas tworzenia symulacji ruchu zostały przedstawione w postaci ramowego algorytmu postępowania:
1. Zdefiniowanie rodzaju symulacji (kinematyczna, dynamiczna) oraz wybór solvera (wbudowany w oprogramowanie – Adams, Recurdyn lub inny zewnętrzny)
2. Importowanie modeli 2 lub 3D z modułu Modeling
3. Utworzenie “linków” – modele geometryczne zostają przedefiniowane i oznaczone jako elementy typu Link
4. Utworzenie “jointów” – należy zdefiniować więzy pomiędzy linkami (modelami)
5. Utworzenie relacji – kontaktu miedzy linkami oraz zadanie obciążenia (jeśli jest to konieczne)
6. Zdefiniowanie materiału – wymagane jest do wyliczenia środków ciężkości “linków” biorących udział w symulacji
7. Zadanie napędów – zdefiniowanie zewnętrznego wymuszenia
8. Zdefiniowanie markerów i punktów charakterystycznych – określenie punktów, których parametry zostaną zapisane oraz przedstawione w formie wykresów
9. Utworzenie nowego rozwiązania – określenie liczby kroków i czasu symulacji, oraz wpływu parametrów zewnętrznych, takich jak np. wartość siły grawitacji
10. Uruchomienie obliczania symulacji
11. Symulacja oraz weryfikacja działania mechanizmu Właściwe zdefiniowanie relacji, więzów pomiędzy poszczególnymi elementami mechanizmu jest kluczowym etapem realizacji symulacji. W tabeli 1 przedstawione są relacje (zachodzące bezpośrednio pomiędzy członami mechanizmu), których zdefiniowanie umożliwia Moduł Motion Simulation.
Właściwe zdefiniowanie relacji, więzów pomiędzy poszczególnymi elementami mechanizmu jest kluczowym etapem realizacji symulacji. W tabeli 1 przedstawione są relacje (zachodzące bezpośrednio pomiędzy członami mechanizmu), których zdefiniowanie umożliwia Moduł Motion Simulation.
Tabela. 1 Relacje oraz przykład zastosowania
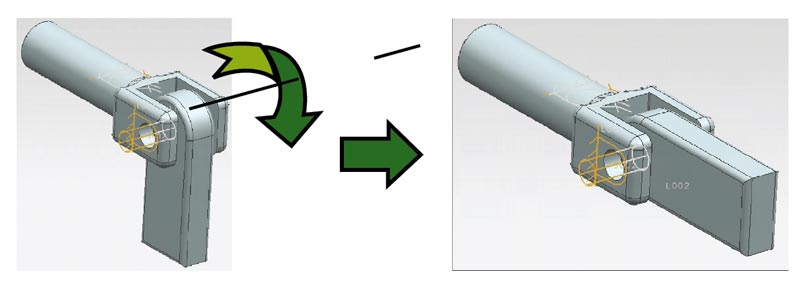
| Relacja obrotowa (Revolute) Odbiera 5 stopni swobody. Możliwy jest tylko obrót członu względem osi obrotu. Lokalizacja relacji jest dowolna wzdłuż wspólnej osi względem, której człony mogą się obracać. |
 |
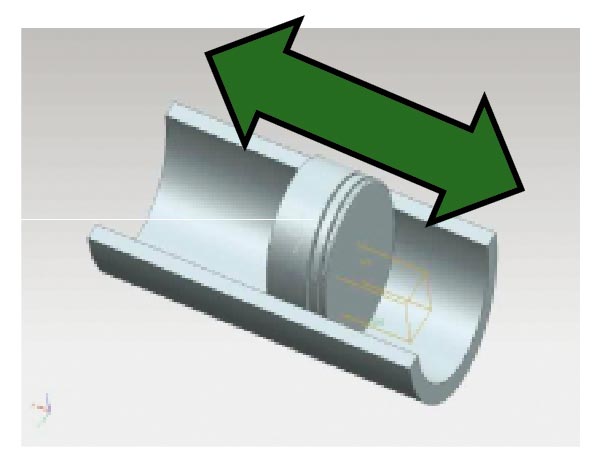
| Relacja przesuwna (Slider) Odbiera 5 stopni swobody. Po nałożeniu więzi tego typu możliwe jest przemieszczanie się jednej z części względem drugiej wzdłuż określonego kierunku. Przykładem może być przesuwanie się tłoka w cylindrze. |
 |
| Relacja cylindryczna (Cylindrical) Odbiera 4 stopnie swobody. Więzy tego typu stanowią rozszerzenie więzi suwakowej o dodatkowy obrót części względem siebie. |
 |
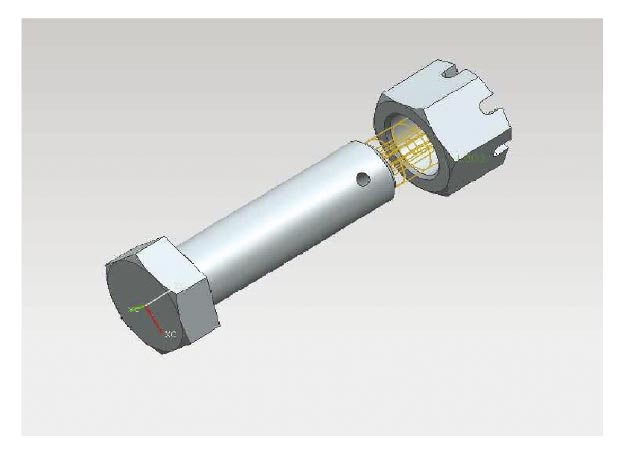
| Relacja śrubowa (Screw) Więź umożliwia obrót jednego ciała względem drugiego przy jednoczesnym przemieszczeniu o zdefiniowany skok gwintu. |
 |
| Relacja uniwersalna (Universal) Odbiera 4 stopni swobody. Pozwala na przekazywanie ruchu obrotowego z jednego ciała na drugie, poprzez połączenie dwóch ciał w punkcie (np.: sprzęgło Cardana). |
 |
| Relacja sferyczna (Spherical) Więź umożliwia obrót jednego ciała względem drugiego przy jednoczesnym przemieszczeniu o zdefiniowany skok gwintu. |
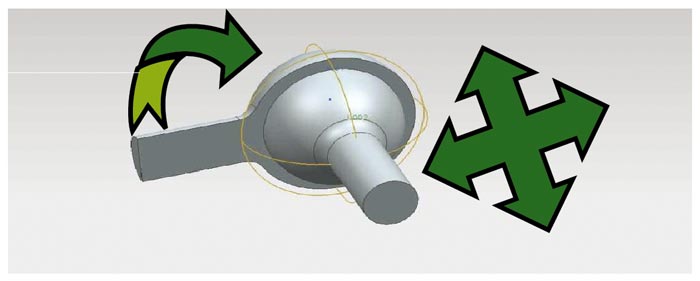 |
| Relacja płaska (Planar) Odbiera 3 stopnie swobody. Pozwala powiązanie dwóch części za pośrednictwem płaszczyzn. Umożliwia ruch części wzdłuż dwóch osi równoległych do płaszczyzny oraz obrót względem osi prostopadłej do tych płaszczyzn. |
 |
| Relacja stało-prędkościowa (Constant Velocity) Odbiera 4 stopni swobody i służy do przenoszenia prędkości obrotowych z jednego ciała na drugi. Zasada działania więzi stało-prędkościowej jest taka sama jak więzi uniwersalnej. |
Relacja utwierdzająca (Fixed) Odbiera 6 stopni swobody. Możliwe jest zdefiniowanie relacji fixed miedzy dwoma częściami, wówczas części te będą ze sobą połączone i nie będą poruszać się względem siebie. Dla poprawności działania animacji zawsze należy jednej z części nadać więź fixed, w przeciwnym razie po obliczeniu i wizualizacji animacji, cały zamodelowany mechanizm runie w przestrzeni roboczej programu. W celu poprawnej budowy mechanizmu, więź fixed definiuje się na elementach, które nie biorą udziału podczas symulacji ruchu danego mechanizmu. Są to np. obudowy mechanizmu, obudowy łożysk, ramy i inne. |