






Na całym świecie, w wielu ośrodkach naukowo-badawczych prowadzi się prace nad rozwojem równoległych lub szeregowo-równoległych struktur kinematycznych w maszynach technologicznych, pomiarowych i manipulacyjnych, m.in. w robotach, obrabiarkach, platformach roboczych i symulatorach ruchu.
Sławomir Błasiak, Marta Grzyb, Paweł Łaski, Jakub Takosoglu
Łańcuchy kinematyczne manipulatorów składają się z kilku ogniw czynnych lub biernych, umożliwiających przestrzenne przemieszczanie i orientację końcówki roboczej (efektora), związanej z narzędziem lub chwytakiem. Manipulatory równoległe zbudowane są z zamkniętych łańcuchów kinematycznych.
Manipulatory równoległe z napędami mięśniowymi  Jednym z rozwiązań, przypominającym „trąbę słonia”, jest zaprojektowany przez autorów prototyp pneumatycznego manipulatora o kinematyce równoległej (rys. 1.1). Pojedyncze moduły wykonane są z równolegle połączonych pneumatycznych elementów rurowych rozciągających się pod wpływem sprężonego powietrza. Rozwiązanie to jest szczególnie predysponowane do zastosowań w rehabilitacji medycznej. Wynika to z zastosowanych członów napędowych w postaci aktuatorów mięśniowych, które łagodnie kurczą się i prostują, ponadto nie występuje tu niekorzystne zjawisko stick-slip, jak to ma miejsce w tradycyjnych siłownikach. Konstrukcja nie posiada elementów, które mogłyby wprowadzać luzy (brak przegubów).
Jednym z rozwiązań, przypominającym „trąbę słonia”, jest zaprojektowany przez autorów prototyp pneumatycznego manipulatora o kinematyce równoległej (rys. 1.1). Pojedyncze moduły wykonane są z równolegle połączonych pneumatycznych elementów rurowych rozciągających się pod wpływem sprężonego powietrza. Rozwiązanie to jest szczególnie predysponowane do zastosowań w rehabilitacji medycznej. Wynika to z zastosowanych członów napędowych w postaci aktuatorów mięśniowych, które łagodnie kurczą się i prostują, ponadto nie występuje tu niekorzystne zjawisko stick-slip, jak to ma miejsce w tradycyjnych siłownikach. Konstrukcja nie posiada elementów, które mogłyby wprowadzać luzy (brak przegubów). 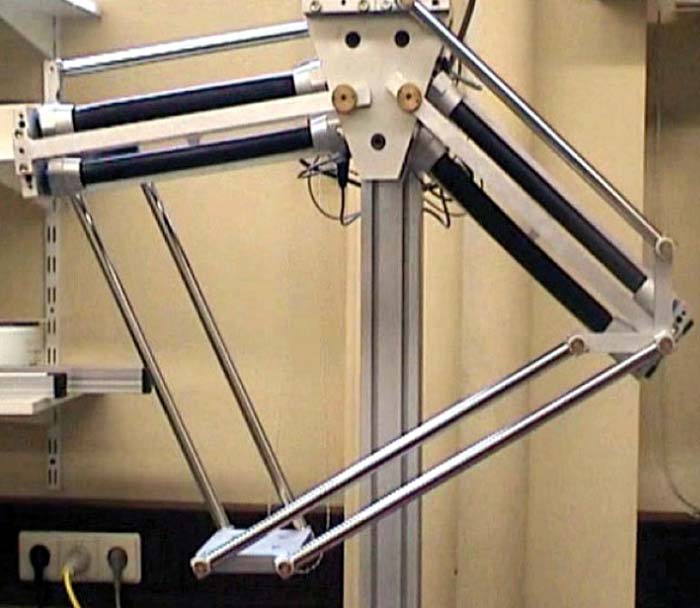 Odmienną konstrukcję manipulatora, zaprojektowaną przez W. Kuhlbusch, i dr R. Neumanna w firmie Festo, o zamkniętym łańcuchu kinematycznym, przedstawia rysunek 1.2. Członami czynnymi w tej konstrukcji są dwie pary mięśni pneumatycznych (Fluid Muscle typu MAS). Platformę roboczą stanowi płyta połączona za pomocą przegubów obrotowych z biernymi członami napędowymi. Manipulator posiada dwa stopnie swobody z możliwością przemieszczania platformy roboczej w płaszczyźnie pionowej. Ruch roboczy uzyskuje się dzięki skróceniu mięśni i przeniesieniu za pomocą biernych członów napędowych i układu dźwigni do platformy. Własności mięśni zapewniają wysoką dynamikę z zachowaniem łagodnego startu i hamowania. Ponadto tu także nie występuje zjawisko stick-slip.
Odmienną konstrukcję manipulatora, zaprojektowaną przez W. Kuhlbusch, i dr R. Neumanna w firmie Festo, o zamkniętym łańcuchu kinematycznym, przedstawia rysunek 1.2. Członami czynnymi w tej konstrukcji są dwie pary mięśni pneumatycznych (Fluid Muscle typu MAS). Platformę roboczą stanowi płyta połączona za pomocą przegubów obrotowych z biernymi członami napędowymi. Manipulator posiada dwa stopnie swobody z możliwością przemieszczania platformy roboczej w płaszczyźnie pionowej. Ruch roboczy uzyskuje się dzięki skróceniu mięśni i przeniesieniu za pomocą biernych członów napędowych i układu dźwigni do platformy. Własności mięśni zapewniają wysoką dynamikę z zachowaniem łagodnego startu i hamowania. Ponadto tu także nie występuje zjawisko stick-slip.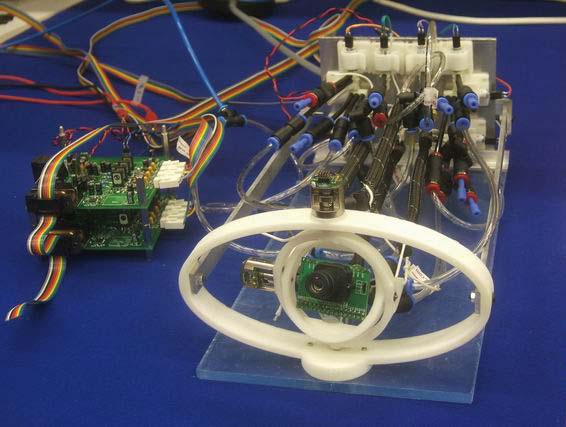 Jako człony napędowe w konstrukcji przedstawionej na rysunku 1.3 zastosowano mięśniowe aktuatory pneumatyczne. Współdziałające pneumatyczne napędy mięśniowe oraz konstrukcja nośna tworzy zamknięte pętle łańcucha kinematycznego. Platforma robocza ma możliwość obrotu względem dwóch osi przechodzących przez jej środek, w którym zamocowana jest kamera. Człony napędowe w postaci aktuatorów mięśniowych połączono z podstawą oraz platformą roboczą za pomocą elementów cięgnowych.
Jako człony napędowe w konstrukcji przedstawionej na rysunku 1.3 zastosowano mięśniowe aktuatory pneumatyczne. Współdziałające pneumatyczne napędy mięśniowe oraz konstrukcja nośna tworzy zamknięte pętle łańcucha kinematycznego. Platforma robocza ma możliwość obrotu względem dwóch osi przechodzących przez jej środek, w którym zamocowana jest kamera. Człony napędowe w postaci aktuatorów mięśniowych połączono z podstawą oraz platformą roboczą za pomocą elementów cięgnowych.
Model bryłowy manipulatora płaszczyznowego typu 3RRR
Na rysunku 3.3 przedstawiono model bryłowy płaszczyznowego manipulatora równoległego z aktuatorami mięśniowymi jako członami napędowymi. Ogólny przypadek takiej struktury kinematycznej możemy analizować na podstawie płaskiego manipulatora równoległego typu 3RRR przedstawionego na rysunku 2.1.
Ruchliwość manipulatorów decyduje o ich przeznaczeniu i przydatności technicznej. Ruchliwość manipulatorów równoległych może być równa liczbie członów napędowych, które zapewniają ruch przymusowy struktury kinematycznej. Projektowany manipulator składa się z trzech członów napędowych w postaci par aktuatorów pneumatycznych (muskułów).
Rys. 2.1. Schemat struktury kinematycznej manipulatora równoległego typu 3RRR
Dla płaskiego manipulatora płaszczyznowego przestawionego na rysunku 2.1, na podstawie zależności (2.1), obliczono liczbę stopni swobody. W podstawie manipulatora zamocowane są trzy obracające się czopy (osie), oznaczone jako punkty P, Q i R, oraz trzy ruchome osie A, B i C definiujące geometrię ruchomej platformy.
Trzy kończyny (ramiona) łączą ruchomą platformę w punktach A, B i C do ustalonej podstawy w punktach P, Q i R, za pomocą połączeń obrotowych. Każde ramię składa się z dwóch członów biernych połączonych przegubem obrotowym. Razem, mechanizm składa się z ośmiu elementów (członów biernych, podstawy i platformy) i dziewięciu połączeń obrotowych. Ilość stopni swobody obliczono z zależności:
(2.1)![]()
(2.2)
gdzie:
l – liczba poruszanych członów manipulatora (podstawa, platforma, napędy),
n– liczba połączeń przegubów i członów napędowych manipulatora,
di – liczba odebranych stopni swobody,
f – liczba stopni swobody mechanizmu manipulatora.
- start
- Poprzedni artykuł
- 1
- 2
- 3
- Następny artykuł
- koniec