






Strona 1 z 2
Mało kto wie lub pamięta, że w Polsce mieliśmy własne konstrukcje robotów przemysłowych. Te instalowane dzisiaj w kraju to w zasadzie tylko maszyny importowane. Roboty kojarzą się z takimi firmami jak: Motoman, Fanuc, Panasonic, Cloos, ABB, Kuka, Comau lub innymi jeszcze firmami zagranicznymi. Co prawda prasa informuje o polskich sukcesach młodych inżynierów, czy studentów w konkursach związanych z robotami, bądź o udanych konstrukcjach instytutów, ale należy przyjąć, że są to sukcesy sporadyczne, a dla polskiego przemysłu niewiele z tego wynika.
Jerzy Granicki, Aleksander Łukomski
W wielu fabrykach na terenie kraju pracuje bardzo duża liczba robotów, jak choćby w fabrykach samochodów Volkswagen w Poznaniu, GM w Gliwicach, czy Fiat w Tychach. Także w innych branżach można znaleźć stanowiska zrobotyzowane. Gdyby udało się policzyć wszystkie, to liczba ta byłaby imponująca. Przynajmniej w niektórych branżach stanowiska zrobotyzowane są dość powszechne. Chodzi jednak o to, że mieliśmy – jak to często w naszej historii bywało – „złoty róg”, w latach siedemdziesiątych XX w., na tamte pionierskie w świecie w tej dziedzinie czasy, – zaawansowane prace konstrukcyjne i wdrożeniowe oryginalnych polskich robotów.
Początki robotyki przemysłowej w Polsce sięgają przełomu lat siedemdziesiątych (od 1976 roku w IMP) i osiemdziesiątych, chociaż pierwsze prace badawcze prowadzone były już w latach sześćdziesiątych przez Politechnikę Warszawską i Instytut Techniki Lotniczej. Były wtedy instytucje zajmujące się robotyką, niejako z urzędu jak np. Przemysłowy Instytut Automatyki i Pomiarów, czy Instytut Mechaniki Precyzyjnej. Instytucje te do dzisiaj zajmują się robotyką, zwłaszcza PIAP. Było też duże zainteresowanie w przemyśle. Wiele polskich firm chciało mieć u siebie roboty, czy to z powodu pewnego rodzaju mody lub nobilitacji, czy też z autentycznej potrzeby zastąpienia ludzi w operacjach uciążliwych.
Roboty, które na ogół na świecie były jeszcze pewną nowością (pierwszy robot zainstalowany został w GM w 1958 roku), w niektórych światowych fabrykach w latach siedemdziesiątych stosowane już były nagminnie. W USA powstawały wtedy całe wydziały produkcyjne całkowicie zautomatyzowane, przy dużym udziale robotów, jak np. w 1978 r. w fabryce Forda w Detroit produkowano skrzynie biegów bez udziału człowieka, w nieoświetlonej hali, a właściwie w kompletnych ciemnościach, a jedynymi ludźmi na tym wydziale byli trzej dyspozytorzy. Podobnie było w fabryce Fiata w Cassino we Włoszech, gdzie montaż samochodów odbywał się całkowicie z udziałem robotów. Nawet te niezbędne przy sprzedaży samochodu, trzy litry paliwa do zbiornika nalewał też robot. Jedynymi ludźmi na hali byli ochroniarze. Takich fabryk, w których podejmowano na dużą skalę robotyzację, było więcej. Później, po okresie „zachłyśnięcia się” możliwościami robotów przyszło lekkie otrzeźwienie i dzisiaj, wydaje się, że znaleziono właściwe proporcje w stosowaniu robotów, w stosunku do zatrudnionych ludzi. I to mimo, że obecnie łatwiej jest całkowicie zrobotyzować i zautomatyzować produkcję niż trzydzieści, czy czterdzieści lat wstecz. Ma na to wpływ wiele czynników, nie tylko ściśle technicznych, czy ekonomicznych, ale też humanistycznych. W Polsce, ze względu na wysokie ceny zagranicznych robotów, ich zastosowanie było w latach osiemdziesiątych ograniczone. Prawie żadna kalkulacja nie wykazała by ekonomicznego uzasadnienia dla zrobotyzowania stanowiska i zastąpienie robotem niskopłatnych pracowników. Podejmowano już wtedy próby obliczania efektywności robotów przemysłowych, a także próby okiełznania procesu projektowania poprzez tworzenie metodyki projektowania i oceny stanowiska roboczego. W połowie lat osiemdziesiątych było u nas w Polsce ok. 300 stanowisk zrobotyzowanych, a w pozostałych krajach tzw. demokracji ludowej w sumie też 300. A gdyby wziąć pod uwagę definicję robota, która w Polsce dotyczyła rzeczywistych robotów, ale np. w NRD do robotów zaliczano też manipulatory, to te relacje byłyby jeszcze lepsze. Tak więc na tle tych krajów wyróżnialiśmy się korzystnie. Np. w FSO na linii zgrzewania karoserii Poloneza pracowało 18 amerykańskich robotów Unimate, ale również polski RIMP. Przy okazji warto podać oficjalną, zgodną z prawem obowiązującym w Polsce, definicję robota zaczerpniętą z GUS: „Roboty i manipulatory przemysłowe. – Urządzenia stanowiące zestaw środków realizujących samodzielnie manipulowanie materiałami, detalami i narzędziami, służące do automatycznego wykonywania w podstawowych procesach produkcyjnych funkcji ruchowych, mające sztywne lub swobodne programowanie zmian pozycji i kolejności operacji roboczych według jednej lub kilku osi ruchu i (lub) poruszania się po zadanej trajektorii. Do robotów i manipulatorów nie zalicza się urządzeń sterowanych ręcznie oraz automatów do produkcji części, automatów kopiujących oraz urządzeń do ciągłego ruchu i manipulowania materiałami sypkimi i płynnymi.” Wg tej definicji wiele urządzeń pokazywanych niekiedy w telewizji, a nazywanych robotami wcale nimi nie jest. Np. chirurgiczny Da Vinci, czy niektóre pojazdy sterowane przez operatora za pomocą joystick’a.
W latach siedemdziesiątych ubiegłego wieku podejmowano w Polsce próby budowy własnych robotów. Pierwsze w miarę udane roboty powstały w Przemysłowym Instytucie Automatyki i Pomiarów w Warszawie. Były to roboty PR-02. Prawie jednocześnie, w Centralnym Biurze Konstrukcyjnym Obrabiarek w Pruszkowie powstał robot PRO-30 do obsługi obrabiarek. W Instytucie Mechaniki Precyzyjnej stworzono roboty z serii RIMP. Nazwa, to skrót od: Robot Instytutu Mechaniki Precyzyjnej. Były to:
- RIMP-401 i 402 pomyślane jako roboty do obsługi maszyn i urządzeń technologicznych (Fot. 1 i 2)
- RIMP-901 jako robot typowo malarski (Fot. 3 i Rys. 1)
- RIMP-1000 jako robot do prac spawalniczych (Fot. 4)

Fot. 1 Robot RIMP-401
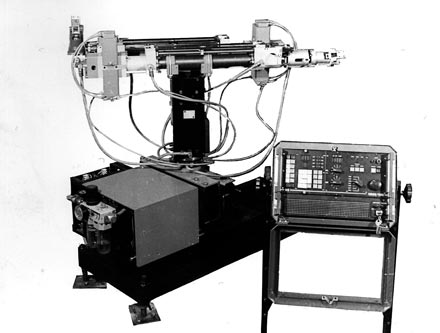
Fot. 2 Robot RIMP-402
Roboty RIMP-401 i RIMP-402 były w zasadzie robotami podającymi pneumatycznymi. RIMP-901 był robotem hydraulicznym, napędzanym siłownikami hydraulicznymi, uczącym się. Lakiernik prowadził pistolet malarski zainstalowany na robocie, a robot zapamiętywał trajektorię i następnie sam już malował wg tej zapamiętanej trajektorii. RIMP-1000 mógł mieć trajektorię składającą się z 1000 punktów, gdyż tyle tylko można było zaprogramować. Wystarczało to jednak do zgrzewania większości detali lub zrealizowania spawania po dość dużym okręgu. Prace przy tych robotach były trudne. Ówczesne władze, mimo że teoretycznie popierały te działania, w praktyce udzielały minimalnego wsparcia. Priorytety były gdzie indziej np. w przemyśle zbrojeniowym. Tak więc konstruktorzy zmuszeni byli do „kombinowania”. W IMP sterowanie robotów powstawało na aparaturze „z odrzutu” z przemysłu zbrojeniowego. Automatycy sami tworzyli pewne aparaty i układy, trochę po majstersku, trochę z tego, co udało się zdobyć w fabrykach samolotów. Było to mocno frustrujące. Obserwując tamte działania w Instytucie, a zwłaszcza w Zakładzie Doświadczalnym na ul. Chłodnej w Warszawie, można było podziwiać heroizm tamtych działań. To, że te roboty działały, że udawało się je zastosować praktycznie, można zawdzięczać sprytowi kilku zapaleńców, ale też pracy ówczesnych naukowców np. z Politechniki Warszawskiej. Sam fakt, że te roboty powstały świadczył o zdolnościach polskich inżynierów. Kraj, który potrafił w tamtych czasach zbudować hydrauliczny robot malarski, samouczący się, był w czołówce światowej techniki. Jednak działania te, może niedocenione przez ówczesne władze, nie wystarczały do przemysłowego zastosowania robotów na dużą skalę.
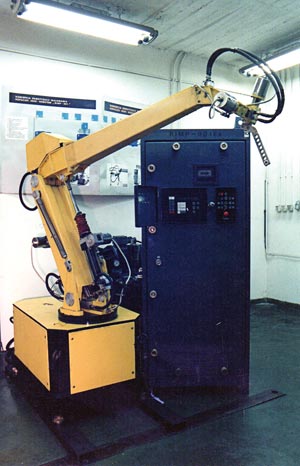
Fot. 3 Robot RIMP-901
- start
- Poprzedni artykuł
- 1
- 2
- Następny artykuł
- koniec