






Inżynierowie z Kalifornijskiego Uniwersytetu Santa Barbara zbudowali aparat skaczący na 30 metrów w górę, co stanowi rekord wysokości skoku i jest zbliżone do teoretycznego maksimum wyliczonego w oparciu o właściwości obecnie dostępnych materiałów.
Prof. Elliot Hawkes kieruje pracami zespołu, badającego możliwości wykorzystania skakania jako sposobu lokomocji. Zespół dokładnie przebadał mechanizmy skokowe występujące w przyrodzie i technice. Rezultatem badań jest jest aparat skaczący na wysokość 30 metrów – wyżej niż jakiekolwiek żywe stworzenie czy dotychczasowe konstrukcje mechaniczne.
Jak wyjaśnia prof. Hawkes, przełom w badaniach nastąpił, kiedy zadano pytanie: czy w budowie mechanicznych aparatów skaczących występują te same ograniczenia, które dotyczą organizmów żywych. Otóż głównym ograniczeniem długości skoku w przyrodzie jest konieczność zapewnienia całej energii wykorzystywanej do skoku w pojedynczym cyklu pracy mięśni. W mechanicznych aparatach skaczących istnieje możliwość zwiększenia energii poprzez zwielokrotnienie cyklu pracy efektora podczas skoku.
Przyrodniczo-techniczne badania porównawcze doprowadziły do sformułowania istotnej zależności, decydującej o efektywności mechanizmów skokowych. Jak tłumaczy Charles Xaio z CU Santa Barbara, w organizmach żywych efektywność skoku wynika z połączenia relatywnie niewielkich rozmiarów mięśnia, wystarczających do zmagazynowania energii pojedynczego skoku, z względnie dużą masą mięśniową. W konstrukcjach mechanicznych jest zupełnie odwrotnie, tzn. efektywność skoku uzyskuje się dzięki połączeniu jak największej sprężyny z niewielkim napędem. W opracowanym aparacie sprężyna jest stukrotnie większa od silniczka napędowego. W biologii za skok odpowiada napęd, czyli mięsień, a w mechanice – sprężyna.
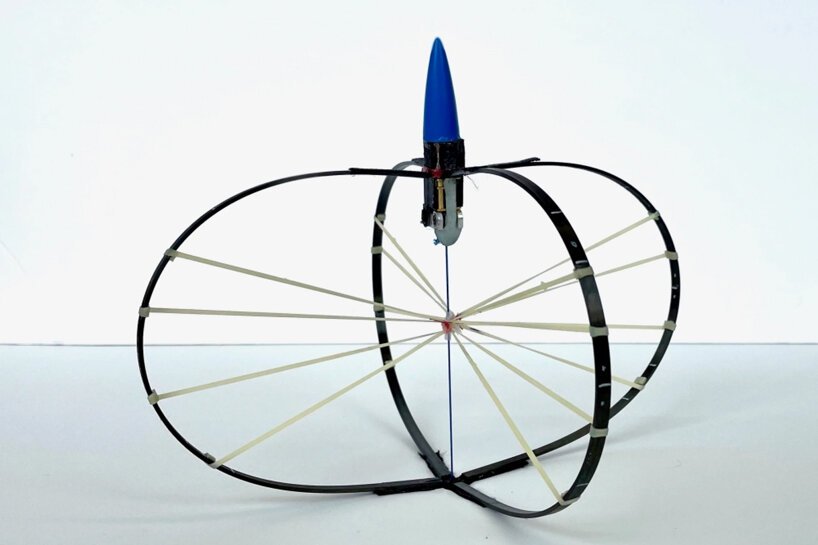
Rekordowy aparat skaczący zbudowano w oparciu o hybrydową, naciągowo-naciskową konstrukcję, złożoną z wykonanych z kompozytu węglowego, łukowych ramion ściskanych, rozmieszczonych koncentrycznie wokół linki rdzenia, nawijanej na wałek silniczka. Ramiona opasano gumowymi, rozciągliwymi linkami, zamocowanymi w osi linki rdzenia. Naciąg gumowych opasek nie tylko zwiększa energię mechanizmu, ale także wpływa korzystnie na wytrzymałość ramion. Mechanizm naciągania efektora wykorzystuje silniczek zasilany baterią 9V. Linka rdzenia jest nawijana przez silniczek na szpulę i blokowana przez zatrzask, co utrzymuje łukowe ramiona zgięte, a gumowe opaski rozciągnięte. Zwolnienie zatrzasku uwalnia energię zapewniającą przyspieszenie rzędu 315 g i wysokość skoku nawet do 32 metrów.
Szacuje się, że na powierzchni księżyca aparat byłby w stanie wykonywać skoki na wysokość 125 metrów i pokonywać dystans 500 metrów co skok. Nie dziwi więc, że jednym z najbardziej interesujących przykładów zastosowania robotów-skoczków może być właśnie eksploracja powierzchni planet i innych ciał niebieskich.
news.ucsb.edu
