






Problem kierowania zespołami robotów w obszarach produkcyjnych, rolniczych lub na terenach dotkniętych klęskami żywiołowymi wydaje się bliski rozwiązania.
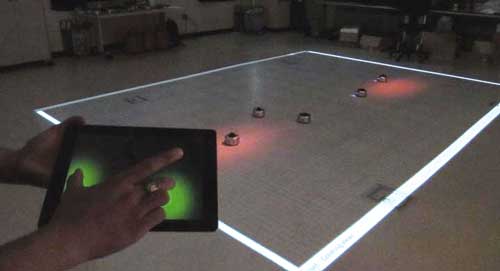
Do tej pory bardzo trudne albo wręcz niemożliwe było, aby jedna osoba mogła kontrolować duża liczbę robotów. Magnus Egerstedt Schlumberger z uniwersytetu w Georgii zaproponował algorytm, dzięki któremu można kontrolować obszar działania wielu robotów, a nie pojedyncze ich egzemplarze. Algorytm jest na tyle elastyczny, że w zależności od oprogramowania robota pozwala mu „zmienić zdanie” i skierować uwagę operatora na coś, czego ten nie zauważa. Całość steruje się przy pomocy wiązki światła i tabletu, wystarczy przesunąć oświetlony obszar na ekranie. Metoda jest tak prosta, że obsługiwać system może osoba zupełnie nieznająca się na robotyce. Może to mieć ogromne znaczenie, szczególnie w wypadku autonomicznych robotów poszukujących ofiar klęsk żywiołowych.