






Roboty poruszające się dzięki wielu odnóżom, często wzorowane na organizmach żywych ze świata przyrody, mają zwykle dużą liczbę siłowników i przegubów, przez co sterowanie nimi bywa bardzo kłopotliwe. Zwykle w przypadku uszkodzenia jednego elementu urządzenie przestaje działać.
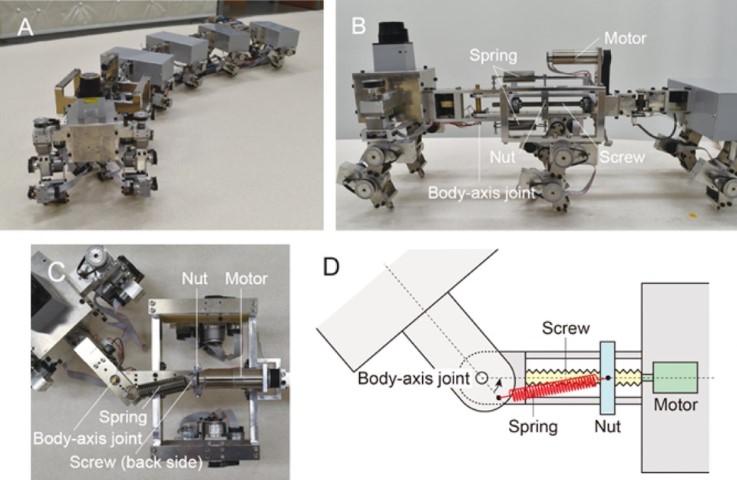
Naukowcy z Uniwersytetu w Osace opracowali biomimetycznego robota wzorowanego na wijach (nadgromada stawonogów). Robot do osiągnięcia celu wykorzystuje naturalną niestabilność – wykorzystano więc to, czego konstruktorzy robotów dotychczas unikali. Zbudowano sześciosegmentowego robota, a każdy segment wyposażono w dwie nogi. Zwiększono elastyczność wszystkich połączeń, co już powoduje niestabilność ruchu. Podczas działania maszyny można modyfikować jej chód. Robot zmierzając do celu nawiguje po zakrzywionych liniach, przy czym jest znacznie bardziej odporny na uszkodzenia od dotychczasowych konstrukcji.
osaka-u.ac.jp



