






Wymagania konstrukcyjne oraz dostępna przestrzeń są zawsze podstawą definicji kształtu wszystkich komponentów projektowanego wyrobu. Geometria każdej części produktu jest rezultatem inwencji i doświadczenia konstruktora – rodzi się w jego głowie. Tak było od zawsze, ale rozwój systemów wspomagających projektowanie pozwala dzisiaj nie tylko zdefiniować kształt wymyślony przez konstruktora, a następnie sprawdzić czy dopuszczalne naprężenia i odkształcenia nie zostaną przekroczone, ale także wykonać optymalizację topologiczną kształtu, której wynikiem jest sugestia, jaki ten kształt powinien być. Dzięki temu coraz bardziej powszechne jest projektowanie komponentów spełniających wymagania konstrukcyjne z jednoczesną minimalizacją ich ciężaru (Lightweight Design).
Andrzej Wełyczko
Jeśli takie zadanie jest realizowane na platformie 3DEXPERIENCE (opisywane w naszym magazynie w wydaniach 7/8 oraz 9 z 2017 r.), to problemu nie ma, bo aplikacja Functional Generative Design wspomaga realizację wszystkich etapów takiego procesu. Jeśli korzystamy z innych rozwiązań to rezultat optymalizacji topologicznej (realizowanej metodą elementów skończonych) jest siatką – zwykle dostępną w formacie STL. I tu pojawia się pytanie: w jaki sposób można łatwo i szybko zdefiniować dokładny model powierzchniowy lub bryłowy na bazie siatki STL?
W pewnym sensie to zadanie jest podobne do rekonstrukcji modelu powierzchniowego na bazie wyników skanowania rzeczywistego komponentu. Rezultat skanowania jest chmurą punktów, którą bardzo łatwo można przekształcić w siatkę. Jednak tym razem celem rekonstrukcji nie jest dokładne odwzorowanie siatki, ale szybka definicja modelu powierzchniowego, którego kształt jest zbliżony do tej siatki. Dlaczego? Wynikiem optymalizacji topologicznej jest tylko sugestia, propozycja kształtu optymalnego i dlatego nie jest konieczna jego precyzyjna rekonstrukcja.
Rys. 1
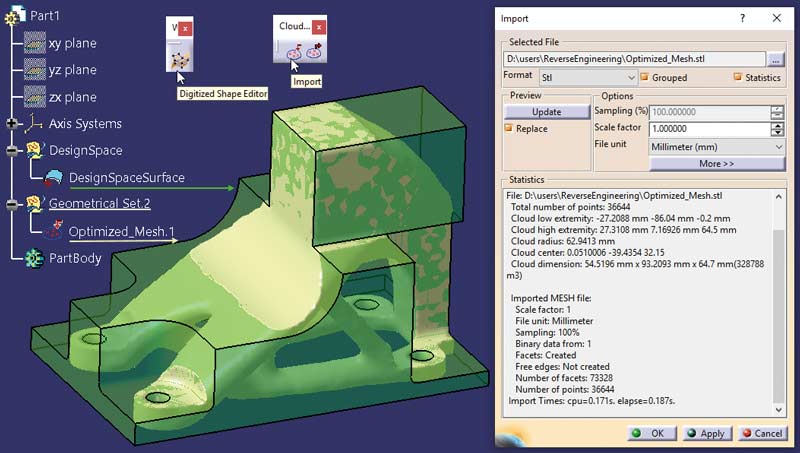
Rozważmy realizację takiego zadania w systemie CATIA V5. Przestrzeń projektowa została zdefiniowana jako powierzchnia (DesignSpaceSurface na rysunku 1), a rezultat optymalizacji topologicznej (tu: Optimized_Mesh.1) jest plikiem w formacie STL, który został wczytany za pomocą polecenia Import w środowisku Digitized Shape Editor.
cały artykuł dostępny jest w wydaniu 12 (147) grudzień 2019



