






Niezależnie od formy danych wejściowych muszą być one opracowane w oprogramowaniu CAD, by móc je wykorzystać w CAM. Kwestia transferu danych może być źródłem błędów. Główną przyczyną jest jednak mała sztywność robota przemysłowego względem stacjonarnych obrabiarek CNC, co wymusza potrzebę kontrolowania obciążenia narzędzia (promieniowego i osiowego), a także posuwu roboczego. Celem jest zapewnienie płynnego przejścia roboczego narzędzia bez nagłych zmian jego toru, z możliwie stałym obciążeniem. Takie rozwiązania stosuje się w opracowywaniu programów obróbkowych na potrzeby HSC (High Speed Cutting) oraz HPM (High Performance Machining).
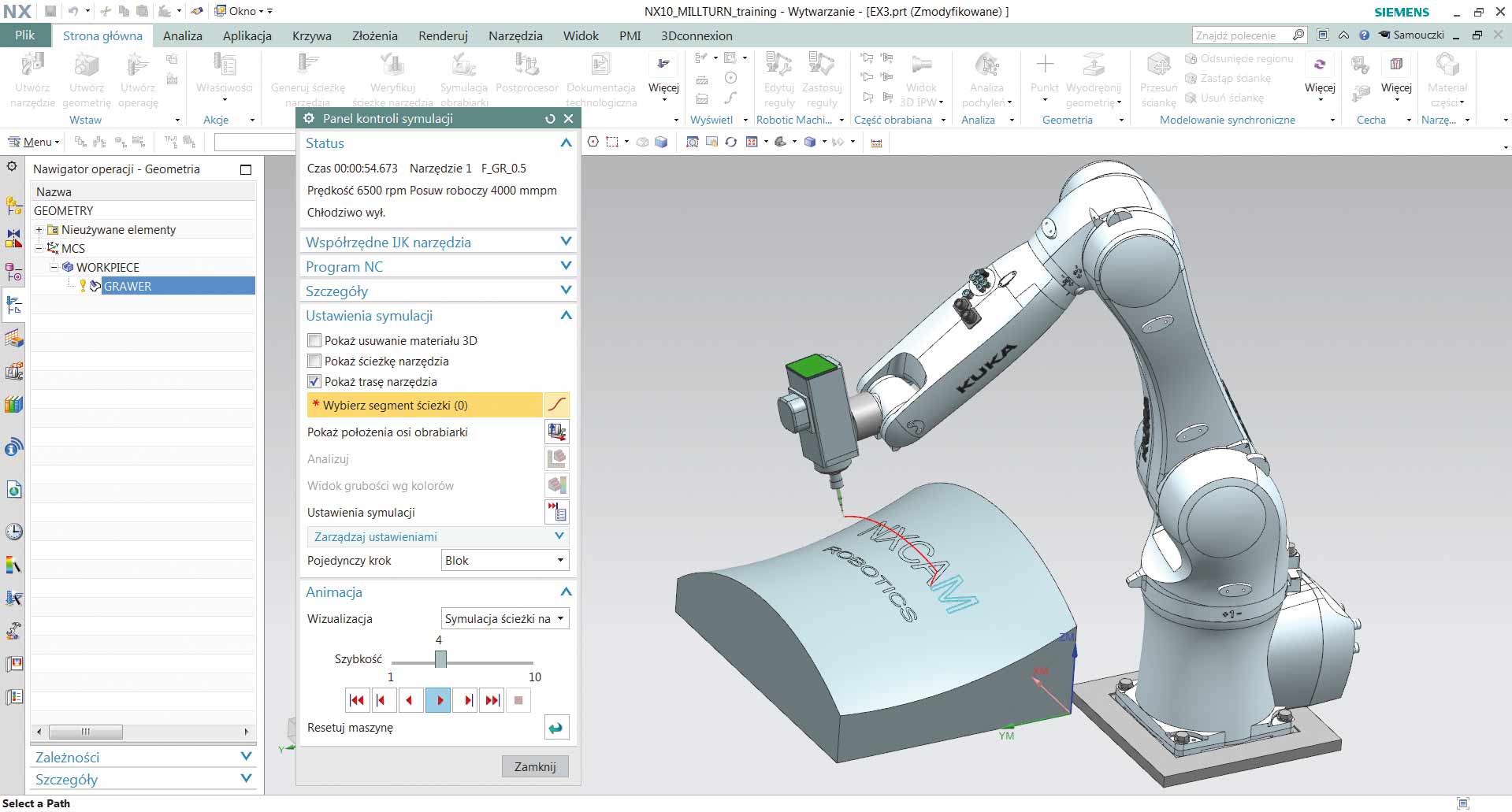
Rys. 5 Symulacja robota KUKA – grawerowanie w NX CAM Robotics
Przykładem może tu być oprogramowanie NX CAM i VoluMill, oraz NX CAM Robotics. Skuteczna integracja możliwości różnych rozwiązań informatycznych pozwala na przeprowadzanie pełnej symulacji obróbki przestrzennej (3D) z jednoczesną analizą kolizyjności, weryfikacją zdefiniowanych warunków brzegowych, przyspieszeń, odnoszeniem się do wybranych członów robota przemysłowego.
Oprogramowanie NX CAM Robotics jest kompatybilne m.in. ze znanymi robotami przemysłowymi, które dziś wykorzystuje się do obróbki frezarskiej: np. ABB, KUKA, FANUC oparte o sterowania ABB RAPID (S4, S4C, S4C+, IrC5), KUKA KRL (KRC 1/2/3/4), FANUC TPE (RJ2, RJ3, R30iA, R30iB), SINUMERIK 840D. Zaletą tego środowiska jest prostota programowania robotów za pomocą tych samych operacji znanych z pakietu frezowania oraz praca w zintegrowanym środowisku NX CAD/CAM. Po zaprogramowaniu ścieżki mamy możliwość przeprowadzenia dokładnej symulacji i weryfikacji obróbki elementu i pracy modelu robota 3D (podobnie jak frezarek).
NX CAM Robotics Machining do programowania robotów w trybie off-line powstał po zintegrowaniu systemu Tecnomatix do zaawansowanych rozwiązań zrobotyzowanych z oprogramowaniem NX CAM. Oprogramowanie to pozwala na projektowanie, symulację, walidację, optymalizację programu obróbki własnych robotów przemysłowych do zadań obróbczych.

Wdrażanie robotów przemysłowych realizujących obróbkę ubytkową uzasadniane jest postępem w zakresie sterowania robotami przemysłowymi, w tym osiąganą dokładnością pozycjonowania i powtarzalnością. Nie bez znaczenia jest tu problematyka wykwalifikowanej kadry pracowników szczebla średniego. Pomimo wielu korzyści zrobotyzowane stanowiska obróbcze ze względu na niewielką sztywność konstrukcji nie są jednak w stanie zastąpić klasycznych (standardowych) frezarskich centrów obróbkowych CNC. Stanowią natomiast rozszerzenie możliwości technologicznych i uzupełniają zdolności produkcyjne, co przy współczesnym charakterze produkcji odgrywa istotną rolę w podtrzymywaniu konkurencyjności na rynku.
dr inż. Radosław Morek
Materiały źródłowe:
R. Lis: Od modelu CAD do sterowania robotami frezującymi, IX Forum Inżynierskie ProCAx 2010
W. Musiał: Zastosowanie robota przemysłowego do obróbki trudno obrabialnych stopów lotniczych ze szczególnym uwzględnieniem powierzchni krzywoliniowych, Mechanik 2/2011
Materiały handlowe firmy CAMdivision
Materiały handlowe firmy KUKA
artykuł pochodzi z wydania 11 (98) listopad 2015
Czytaj także:




- start
- Poprzedni artykuł
- 1
- 2
- Następny artykuł
- koniec